�ѩ�o�O�j�a�Ĥ@���Dzߨϥ� Numerical Recipe �W���{���A�ڧ�ϥΪ��B�J�P�n�I���J�Ӥ@�I�C
�����A�ݲM���Ҥ夤�Ƶ{���ت�������r�ԭz�]�q�l�ɨS���A�Ҥ�~���^�A���O�Ŧ⪺�o�@���G
SUBROUTINE gaussj(a,n,np,b,m,mp)
INTEGER m,mp,n,np,NMAX
REAL a(np,np),b(np,mp)
PARAMETER (NMAX=50)
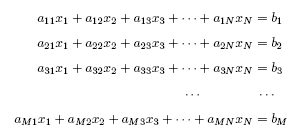
Linear equation solution by Gauss-Jordan elimination, equation (2.1.1) above. a(1:n,1:n)
is an input matrix stored in an array of physical dimensions np by np. b(1:n,1:m) is an input
matrix containing the m right-hand side vectors, stored in an array of physical dimensions
np by mp. On output, a(1:n,1:n) is replaced by its matrix inverse, and b(1:n,1:m) is
replaced by the corresponding set of solution vectors.Parameter: NMAX is the largest anticipated value of n.
INTEGER i,icol,irow,j,k,l,ll,indxc(NMAX),indxr(NMAX),
�o�ح��y�z�F�@����J�ɡAa�Bb �}�C�U�O����H�Υ��̪��j�p n�Bm�Bnp�Bmp ���C �]����F�@����X�ɡA�}�C a�Bb �S�U�ۨ㦳����N�q�C
�䦸�A�ڭ̦ۤv�n�g�@�ӥD�{���ӥs�� gaussj �Ƶ{���C�`�N gaussj �����ŧi a(np,np)�Bb(np,mp) �|�Ψ��ƭ� np �� mp �A�ڭ̷��M���|�Ʊ�C���n�� gaussj �N�h��쥦�����e�A�o�N�����Ѧb�D�{���N�@�n�ŧi�A���Ƶ{�����~�ӡC�h�ڭ̦b�D�{�������@�k�p�U�]�H a �O 3x3�Bb �O column vector 3x1 ���ҡ^�G
program gauss_main
real a(3,3), b(3,1)
integer n, np, m, mp, i
parameter (np=3, mp=1)
�άO�A�y�L�A����@�I
program gauss_main
integer n, np, m, mp, i
parameter (np=3, mp=1)
real a(np,np), b(np,mp)
np�Bmp �������ŧi����ơA�o�O���ӴN�n�����C�@���ϥΤF parameter ���O��o�Ǿ���ܼƪ��ƥ[�H���w�]�b��ӵ{�������̪��ȳ����|�A���ܡA�i�����O�@�ӱ`�ƦӤ��A�O�ܼơ^�A�ڭ̴N�i�H�Ψӫŧi�}�C�A�o�O�]���sĶ���w���T�a���D np�Bmp ���ȬO�h�֤F�C�o�ˡA�����D�{�������ŧi�����A�]�i�H���Ƶ{�� gaussj ���ŧi�����A�ڭ̦b���˵��@ �Ƶ{�� gaussj �b�ŧi a�Bb �������G
SUBROUTINE gaussj(a,n,np,b,m,mp)
INTEGER m,mp,n,np,NMAX
REAL a(np,np),b(np,mp)
PARAMETER (NMAX=50)
INTEGER i,icol,irow,j,k,l,ll,indxc(NMAX),indxr(NMAX),ipiv(NMAX)
REAL big,dum,pivinv
�A�ݡA���O�����ŧi REAL a(np,np),b(np,mp)�A�o�˴N�i�H�F�A�ڭ̧���������� gaussj �����e�C
�@��²�����A��I�s�Ƶ{�� gaussj ���D�{���]���] a �O 3x3�Bb �O 3x1�^�p�U�G
program gauss_main
integer n, np, m, mp, i
parameter (np=3, mp=1)
real a(np,np), b(np,mp)
n=3
m=1
open (unit=20, file='a.dat')
do i=1,3
read (20,*) a(i,1), a(i,2), a(i,3)
enddo
close(20)
open (unit=20, file='b.dat')
do i=1,3
read (20,*) b(i,1)
enddo
close(20)
call gaussj(a,n,np,b,m,mp)
write(*,*) 'The inverse matrix is :'
do i=1,3
write (*,*) a(i,1), a(i,2), a(i,3)
enddo
write (*,*)
write (*,*) 'and the solution matrix is :'
do i=1,3
write (*,*) b(i,1)
enddo
end
�@���\��������A��B�z���P�x�}�j�p���D���D�{���d�Ҧp�U�A���I�ڥH�m��ХX�G
program gauss_main2
integer n, np, m, mp, i
parameter (np=10, mp=20)
real a(np,np), b(np,mp)
character*40 filename1, filename2
write (*,*)'Please tell me the dimension n of the matrix (n,n):'
read (*,*) n
if(n.gt.np) stop 'n can not be larger than np'
write (*,*) 'Please give the size m of the augmented b(n,m):'
read (*,*) m
if(m.gt.mp) stop 'm can not be larger than mp'
write (*,*) 'Please give the file name that contains A :'
read (*,*) filename1
write (*,*) 'Please give the file name that contains b :'
read (*,*) filename2
open (unit=20, file=filename1)
do i=1,n
read (20,*) ( a(i,j), j=1,n )
enddo
close(20)
open (unit=20, file=filename2)
do i=1,n
read (20,*) ( b(i,j), j=1,m )
enddo
close(20)
call gaussj(a,n,np,b,m,mp)
write(*,*) 'The inverse matrix is :'
do i=1,n
write (*,*) ( a(i,j), j=1,n )
enddo
write (*,*)
write (*,*) 'and the solution matrix is :'
do i=1,n
write (*,*) ( b(i,j), j=1,m )
enddo
end
�̫��A�ڭ̭n�� �D�B�Ƶ{���sĶ���쵲�b�@�_�y�X�i�����ɡA�o�n�i��H�U���ʧ@�G
gfortran -o my_gaussj.x gauss_main.f gaussj.f
�Ϊ̬O���� -c�]compile only�^�o�Ӧ� .o �ɫ�A link �b�@�_�p�U�G
gfortran -c gauss_main.f
gfortran -c gaussj.f
gfortran -o my_gaussj.x gauss_main.o gaussj.o
�o�䤤�|�J��ĵ�i�T���A���o�O�L�`��
�����]�O�ܭ��n���C�{����g�n�ɡA�A�i�H�Τ@�Ӥv�g�Ϋܮe�����D���ת��D�إ��@���աA�Ҧp a�Bb ���O���G
��
���F�W�z�ƾڧ@���ɮ� a.dat �P b.dat �����e�A��b�P�i������ my_gauss.x �P�@�ӥؿ��U�A�� ./my_gauss.x�A���״N�|�C�X��ù��W�F�C